Ruoyu Wang
Lecturer @ The University of Hong Kong

I am a Lecturer in the Faculty of Engineering at The University of Hong Kong (HKU). My work focuses on designing active, immersive, and hands-on learning experiences that connect autonomous systems, intelligent robotics, and AI, enabling students to tackle real-world engineering challenges from concept to prototype.
I received my Ph.D. in Mechanical and Automation Engineering from The Chinese University of Hong Kong. My research focuses on aerial robotics, with broader interests in motion planning and control, robot system design and robot learning.
In teaching, I am interested in experiential engineering education and the thoughtful use of AI tools to help students design, build, test, and iterate real systems. I welcome conversations and collaborations at the intersection of robotics applications, AI-enhanced learning, and engineering education. Please feel free to contact me if you are interested in these areas.
News
| Jun 17, 2026 | Our paper, “Tilt-Ropter: A Fully Actuated Hybrid Aerial-Terrestrial Vehicle with Tilt Rotors and Passive Wheels,” has been accepted for presentation at IROS 2026. |
|---|---|
| May 06, 2026 | Our project, HKU Unmanned Aerial Systems Team, has been awarded funding under the UGC Funding Scheme for Mainland and Global Engagement and Student Learning Experience. |
| Mar 30, 2026 | Our project, Design and Development of Aerial Robots for Safer and Smarter Cities, has been awarded the HKUEAA Ir Dr Joseph Chow Ming Kuen Memorial Learning Fund. |
| Jan 13, 2026 | Our paper, “CLIO: Coordinate User Visual Attention with Audio Narratives for Enhanced Engagement,” has been accepted as a Late-Breaking Report at HRI 2026. |
Selected Publications
Selected Projects
Autonomous Drone Inspection for Swimming Pool Ceiling
This project presents a fully autonomous drone-based inspection for the ceiling of Morrison Hill Swimming Pool.
Autonomous Indoor Drone Inspection and Modeling System
This project presents an autonomous indoor drone inspection system with a novel GPU-accelerated mapping algorithm and an AI-based Building Information Modeling method.

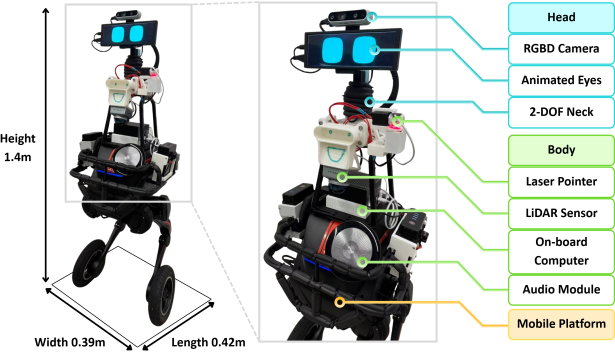
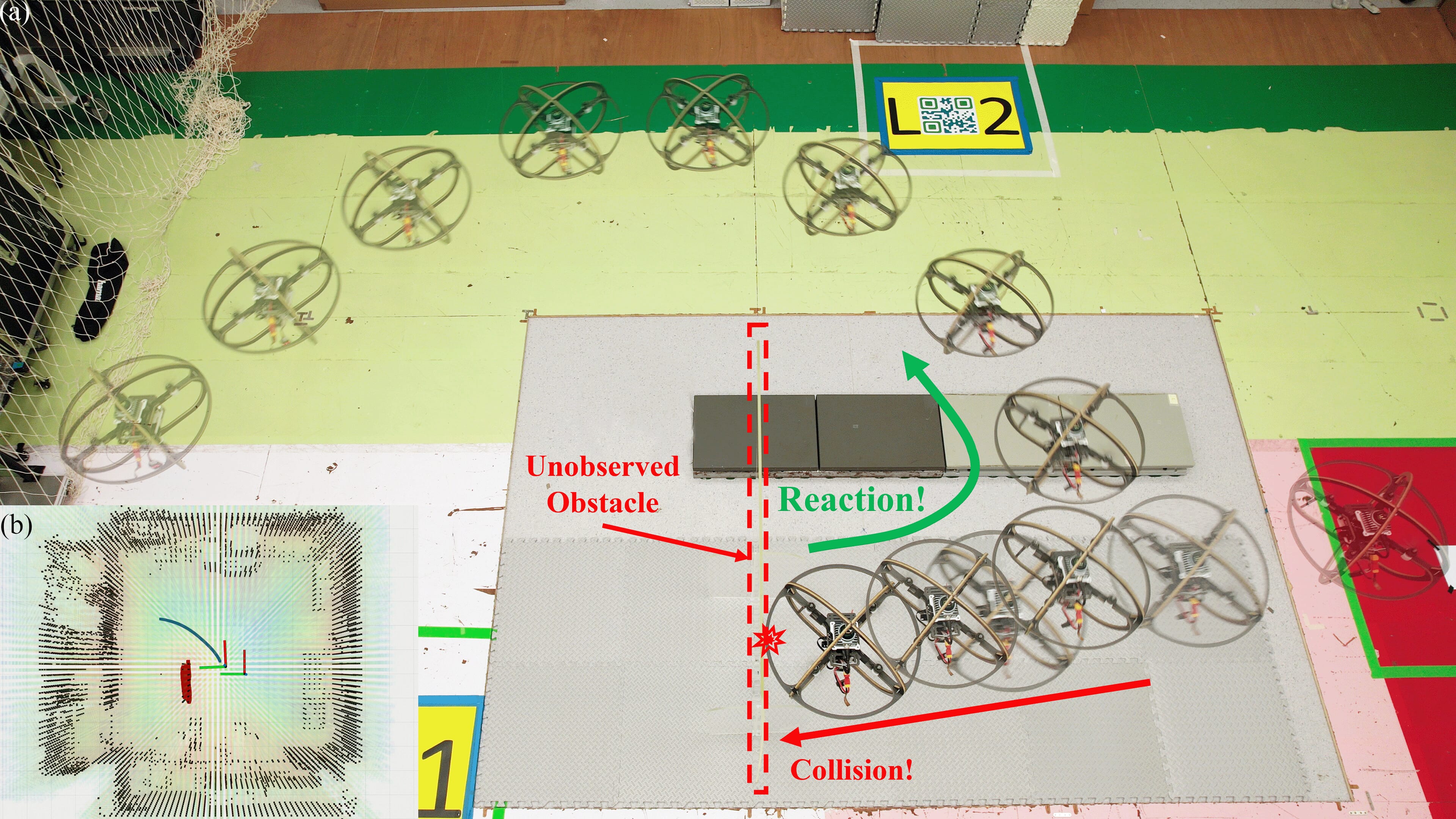
Design of an Autonomous Collision-Resilient UAV
This project presents the design of a collision-resilient UAV with 3D LiDAR and an onboard computer for autonomous drone tasks, such as search-and-rescue, exploration, and inspection.