@article{wang2026tilt,title={Tilt-Ropter: A Fully Actuated Hybrid Aerial-Terrestrial Vehicle with Tilt Rotors and Passive Wheels},author={Wang, Ruoyu and Liu, Xuchen and Wu, Zongzhou and Guo, Zixuan and Ding, Wendi and Chen, Ben M},journal={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2026},}
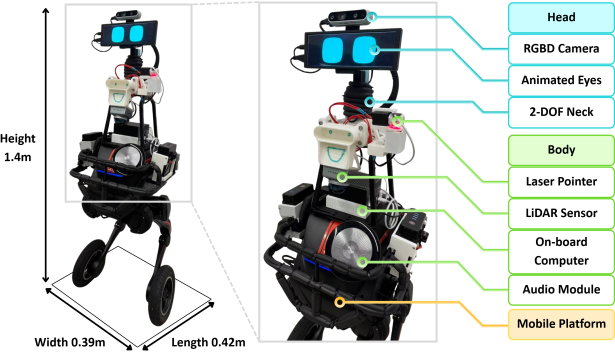
@article{chen2026clio,author={Chen, Yuxuan and Lo, Ian Leong Ting and Guo, Bao and Kawmali, Netitorn and Chan, Chun Kit and Wang, Ruoyu and Pan, Jia and Yang, Lei},journal={21st ACM/IEEE International Conference on Human-Robot Interaction (HRI)},title={CLIO: Coordinate User Visual Attention with Audio Narratives for Enhanced Engagement},year={2026},}
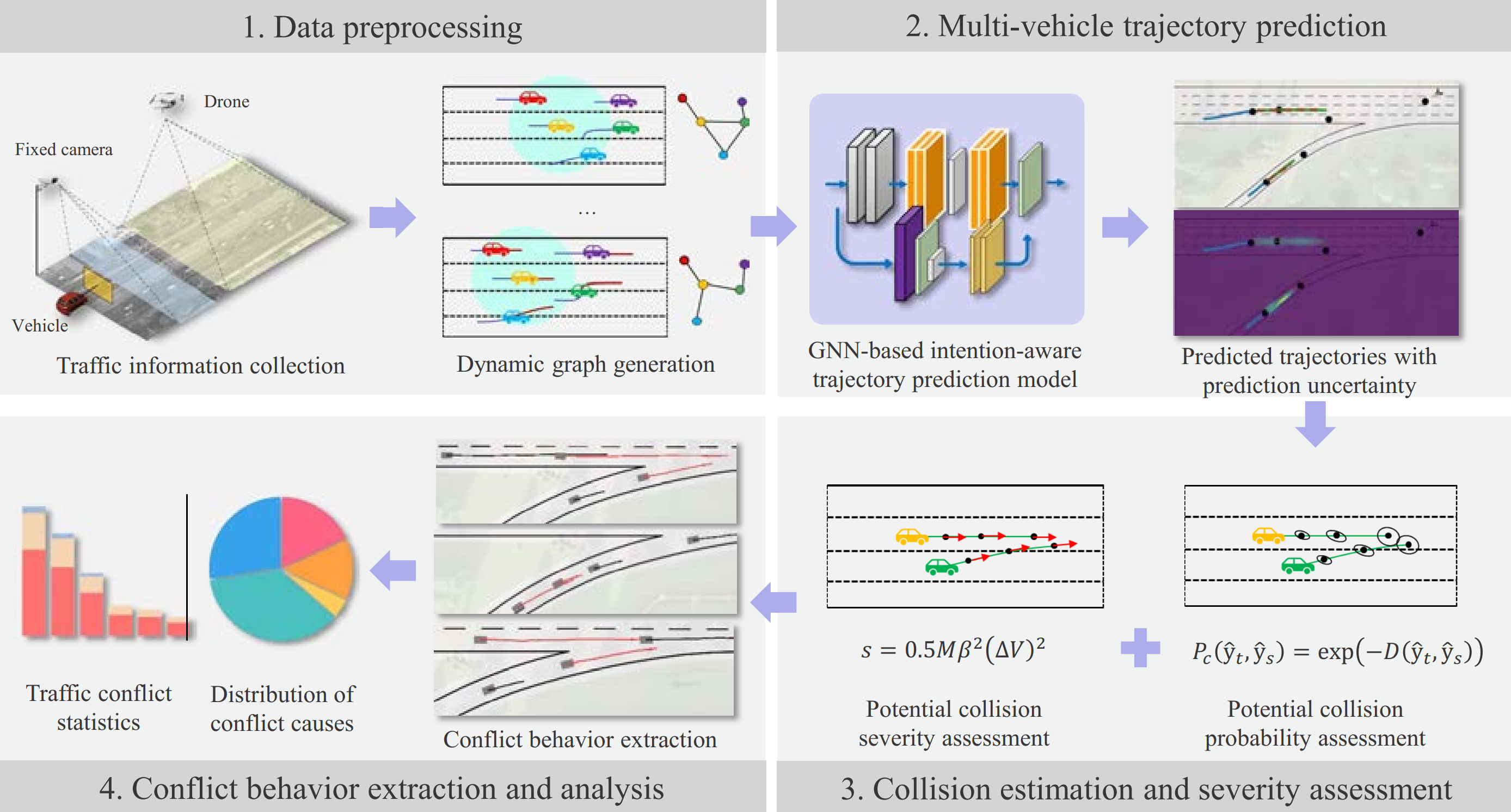
@article{guo2025traffic,title={A Traffic Conflict Identification and Severity Assessment Method Based on Multi-Vehicle Trajectory Prediction},author={Guo, Zixuan and Wang, Ruoyu and Han, Bingxin and Ding, Wendi and Zhao, Zuoquan and Chen, Xi and Chen, Ben M},journal={44th Chinese Control Conference (CCC)},year={2025},publisher={IEEE},}
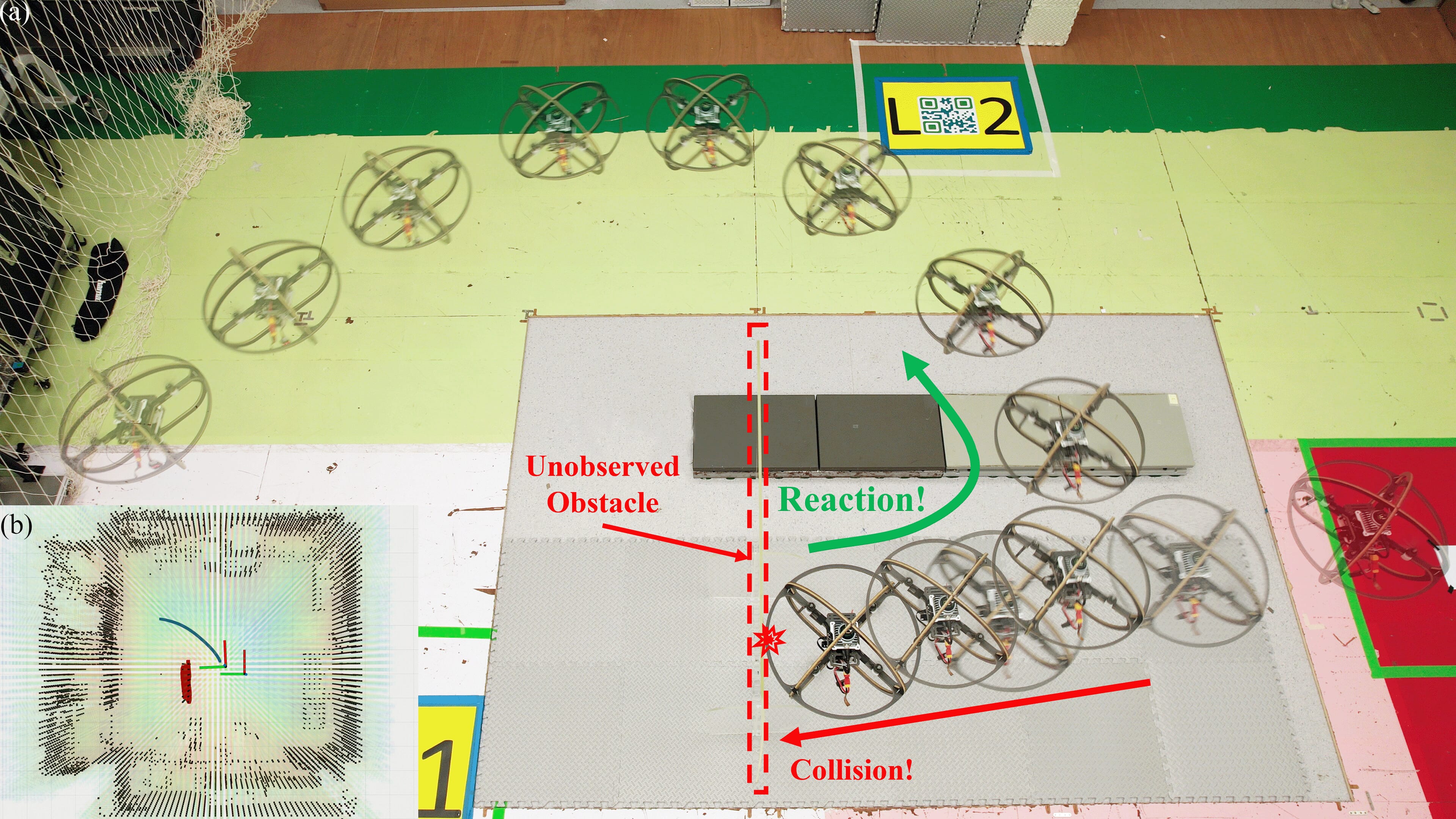
@article{wang2024air,author={Wang, Ruoyu and Guo, Zixuan and Chen, Yizhou and Wang, Xinyi and Chen, Ben M},journal={IEEE International Conference on Robotics and Automation (ICRA)},title={Air Bumper: A Collision Detection and Reaction Framework for Autonomous MAV Navigation},publisher={IEEE},year={2024},}
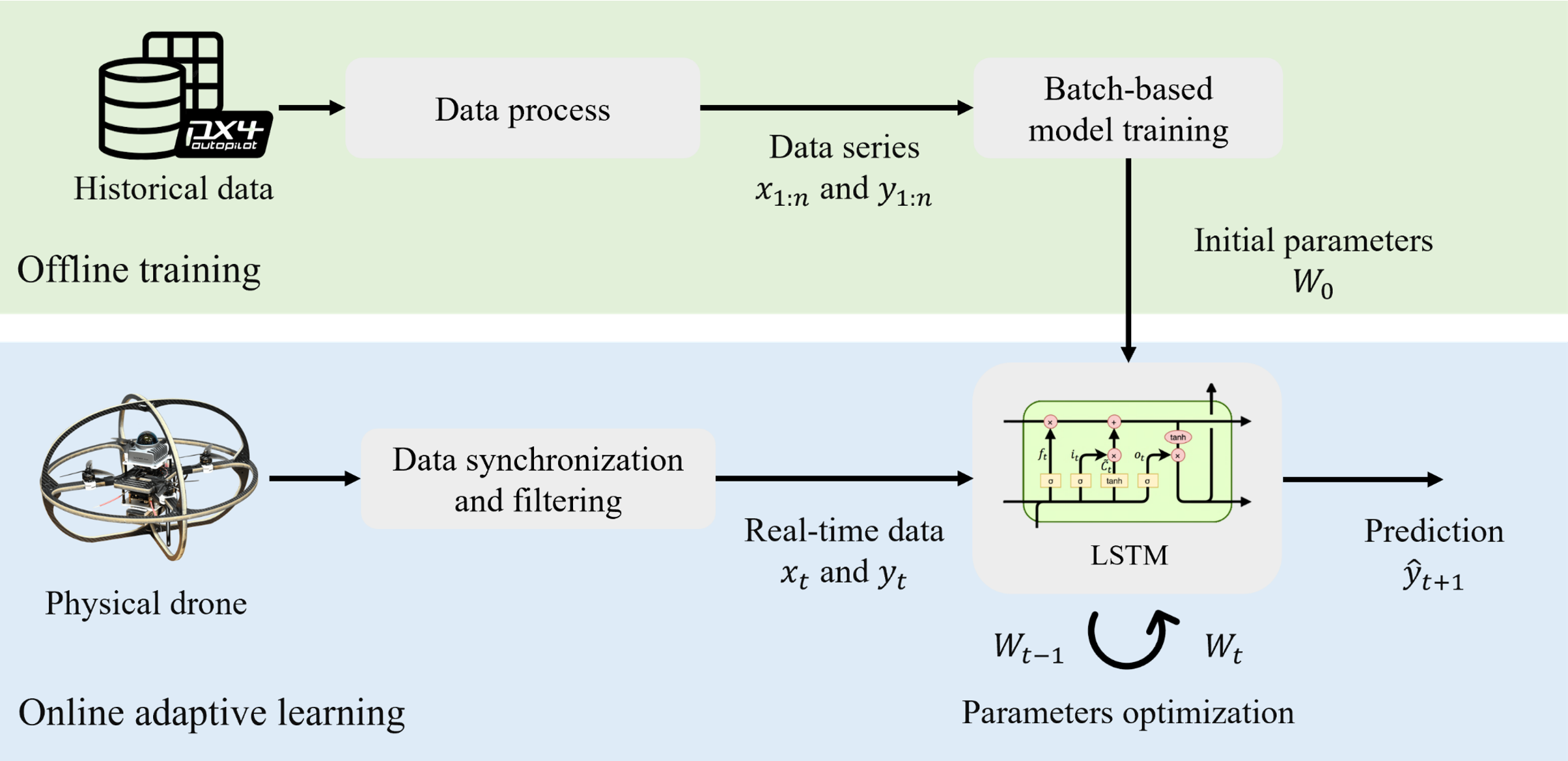
@article{guo2024self,title={A Self-Evolving Digital Twin System Architecture for Indoor UAV Management Based on Online Learning},author={Guo, Zixuan and Wang, Ruoyu and Gao, Chuanxiang and Chen, Yizhou and Zhao, Zuoquan and Chen, Ben M},journal={IEEE International Conference on Robotics and Biomimetics (ROBIO)},pages={262--267},year={2024},publisher={IEEE},}
@article{chen2024synergistic,title={Synergistic Temporal Logic Planning for an Aerial Gripper},author={Chen, Yizhou and Tang, Jerry and Wang, Ruoyu and Guo, Zixuan and Wang, Xinyi and Gao, Songqun and Liu, Xuchen and Pan, Jia and Chen, Ben M},journal={IEEE International Conference on Robotics and Biomimetics (ROBIO)},pages={577--582},year={2024},publisher={IEEE},}
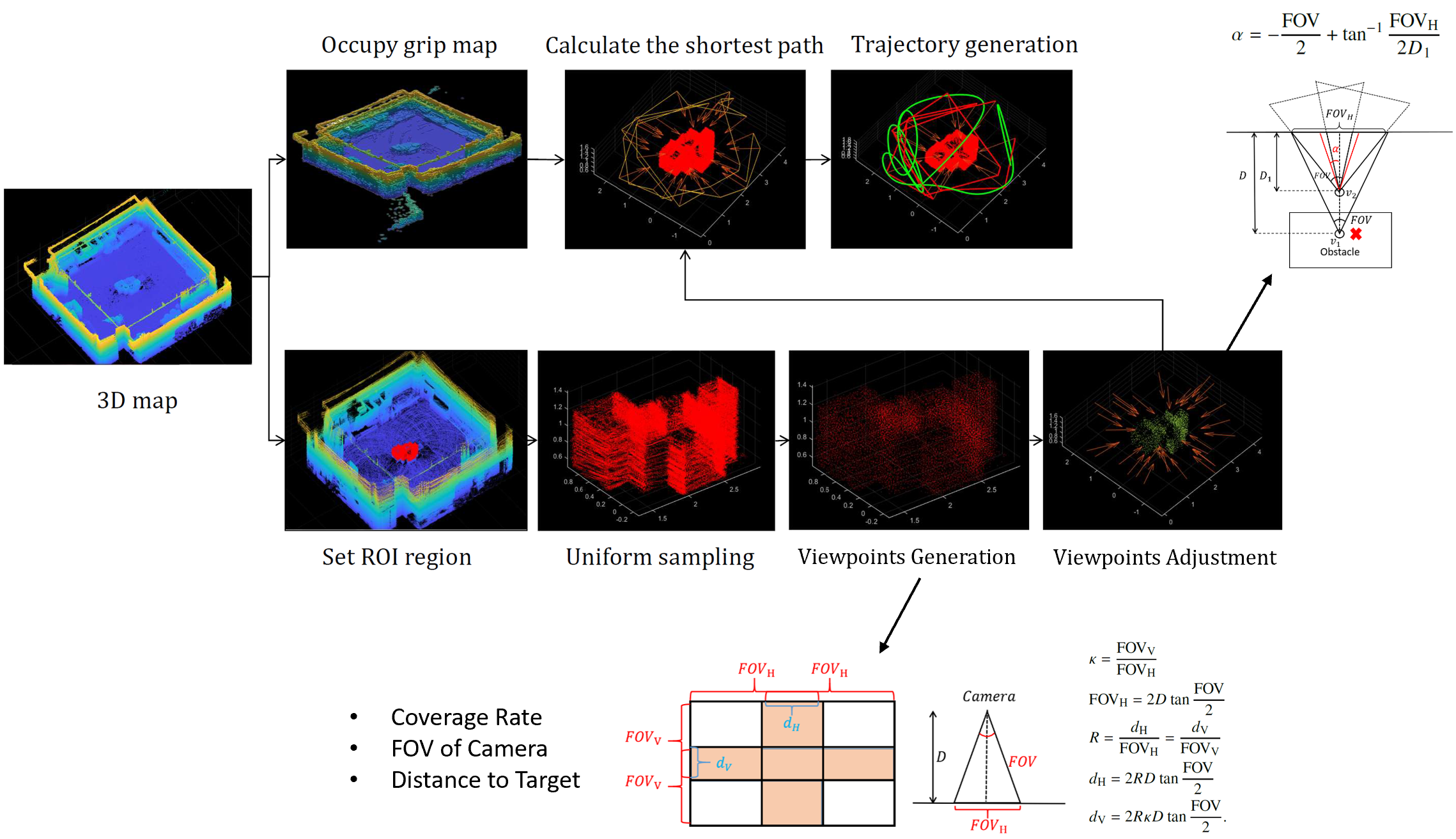
@article{gao2023uav,author={Gao, Chuanxiang and Wang, Xinyi and Wang, Ruoyu and Zhao, Zuoquan and Zhai, Yu and Chen, Xi and Chen, Ben M},journal={Automation in Construction},pages={104753},publisher={Elsevier},title={A UAV-based explore-then-exploit system for autonomous indoor facility inspection and scene reconstruction},volume={148},year={2023},}
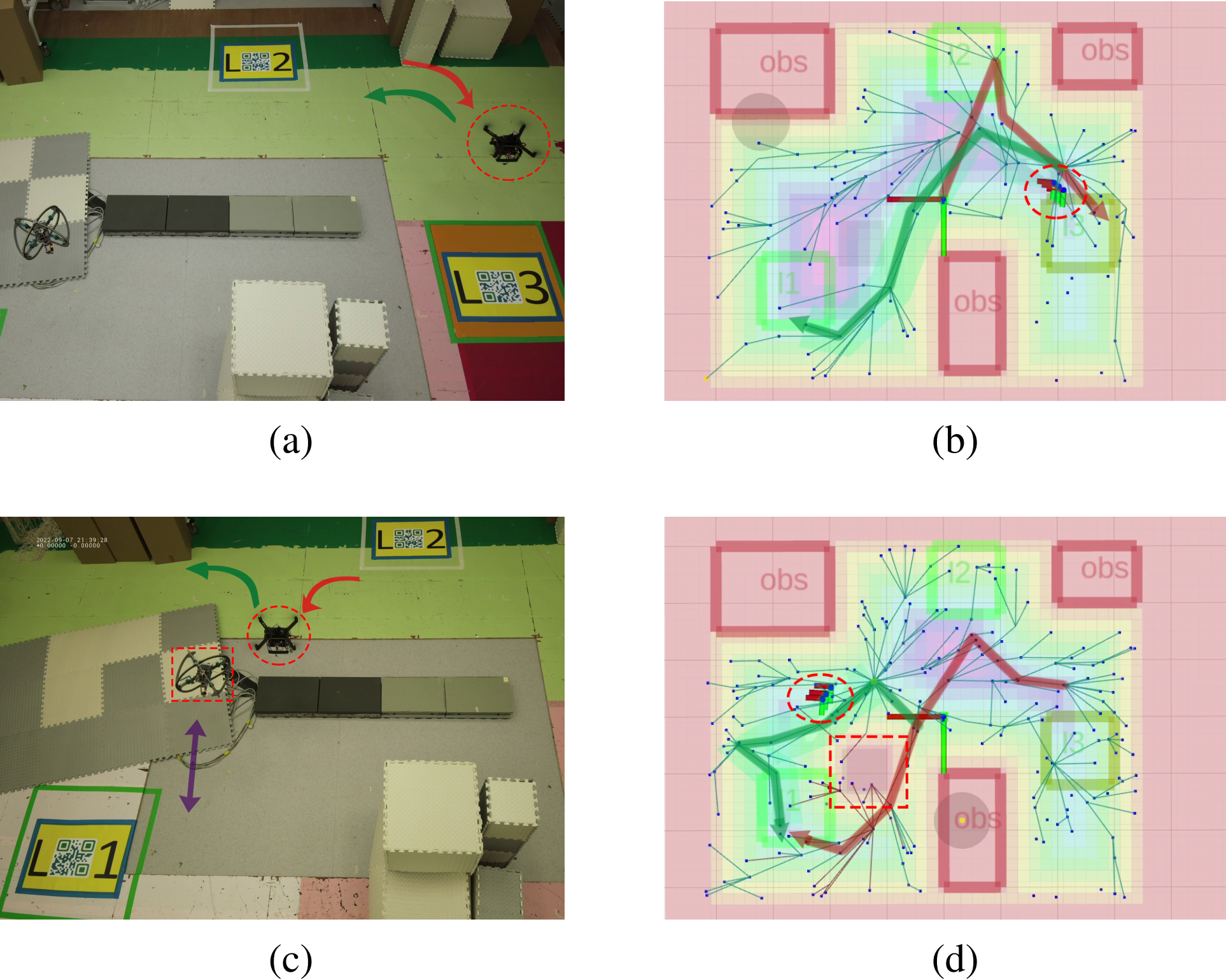
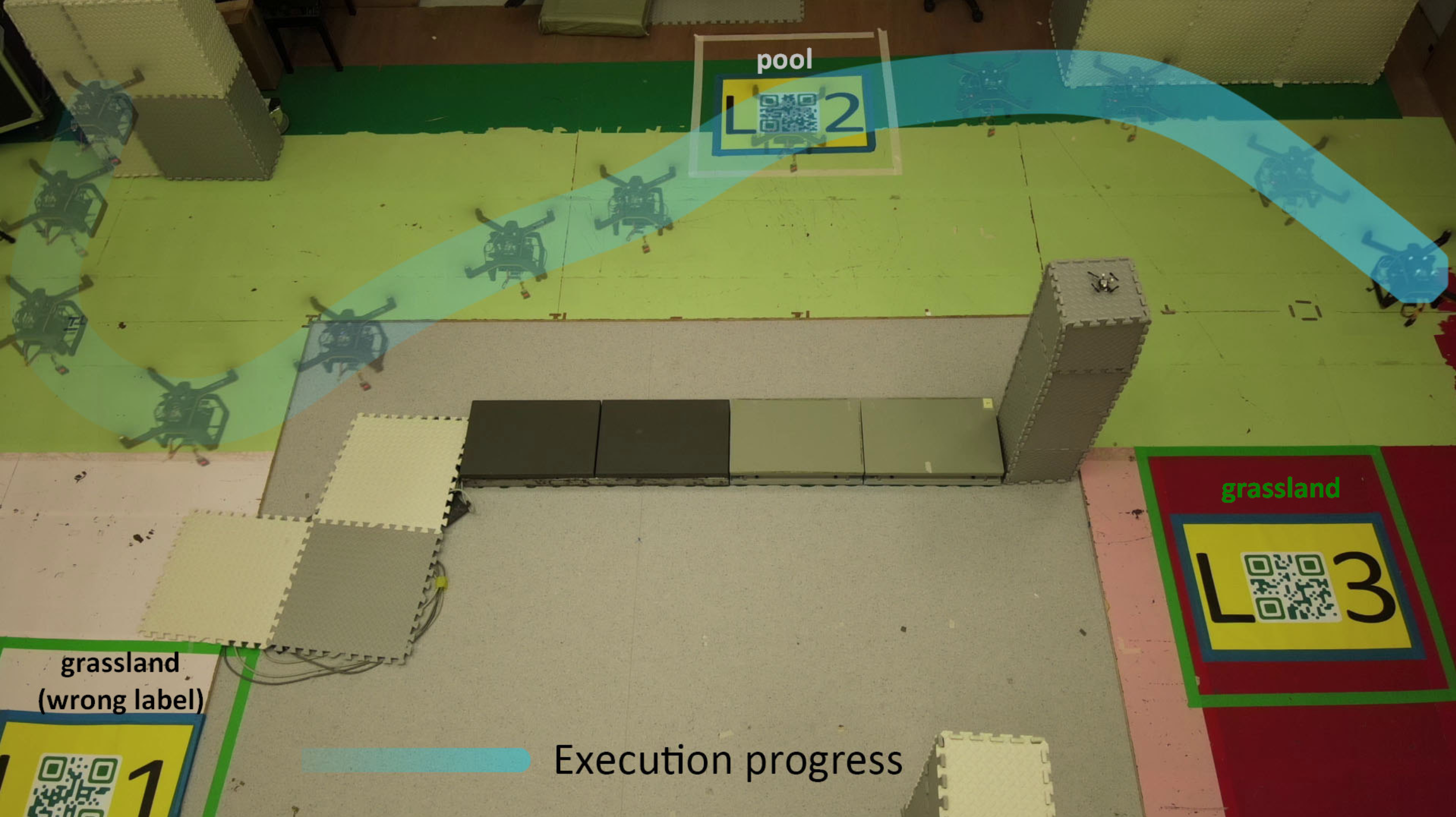
@article{chen2023an,author={Chen, Yizhou and Wang, Xinyi and Guo, Zixuan and Wang, Ruoyu and Zhou, Xunkuai and Yang, Guidong and Lai, Shupeng and Chen, Ben M.},journal={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},title={An interactive system for multiple-task linear temporal logic path planning},year={2023},}
@article{chen2023sampling,author={Chen, Yizhou and Wang, Ruoyu and Wang, Xinyi and Chen, Ben M.},journal={IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},pages={3700-3706},title={Sampling-based path planning under temporal logic constraints with real-time adaptation},year={2023},}
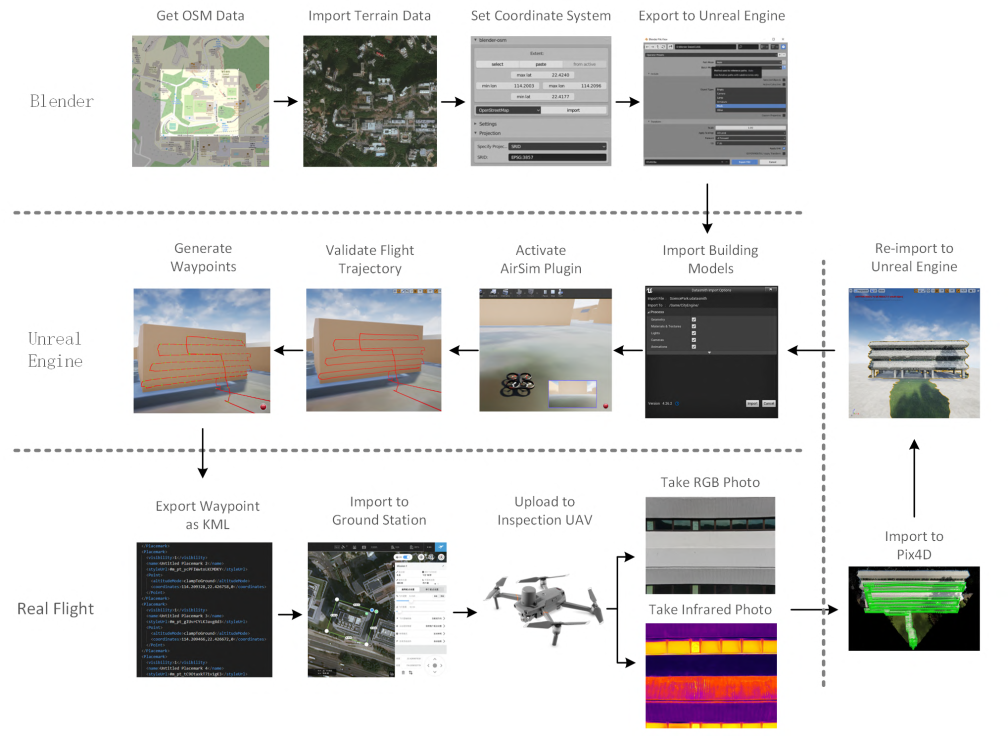
@article{zhang2022sim,author={Zhang, Jihan and Wang, Ruoyu and Yang, Guidong and Liu, Kangcheng and Gao, Chuanxiang and Zhai, Yu and Chen, Xi and Chen, Ben M},journal={International Conference on Unmanned Aircraft Systems (ICUAS)},publisher={IEEE},pages={784--801},title={Sim-in-real: Digital twin based uav inspection process},year={2022},}